
advertisement
รศ.ดร.รณพีร์ ชัยเชาวรัตน์ อาจารย์จากสำนักบริหารหลักสูตรวิศวกรรมนานาชาติ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย เปิดห้องปฏิบัติการแสดงหุ่นยนต์ต้นแบบวีลแชร์เดินได้ (Wheelchair Exoskeleton) สำหรับผู้สูงอายุและผู้มีปัญหาด้านการเคลื่อนไหว ให้สามารถขยับลุกจากการนั่งวีลแชร์ มายืนและเดินได้ในหุ่นยนต์ตัวเดียว

หุ่นยนต์ Wheelchair Exoskeleton คืออะไร ?

Wheelchair Exoskeleton เป็นหุ่นยนต์สวมใส่บนร่างกายเพื่อช่วยการเคลื่อนไหวของมนุษย์ มีลักษณะเป็นได้ทั้งวีลแชร์และแปลงเป็นหุ่นยนต์ โดยชื่อ Exoskeleton มาจาก 2 คำ คือ Exo แปลว่าข้างนอก และ Skeleton แปลว่าโครงกระดูก เมื่อรวม 2 คำนี้ด้วยกัน แปลได้ตรงตัวว่า “โครงกระดูกภายนอก” ซึ่งในทางเทคนิคแล้วเป็นการใช้เครื่องจักรกลประกอบหุ่นยนต์ให้ผู้สวมใส่สามารถออกแรงได้มากขึ้น
advertisement
Wheelchair Exoskeleton ได้รับการออกแบบชิ้นส่วนทุกชิ้นของหุ่นยนต์อย่างละเอียด โดยใช้โปรแกรมสามมิติจากคอมพิวเตอร์ และวัสดุแบบกำหนดเอง โดยรศ.ดร.รณพีร์ ชัยเชาวรัตน์ หัวหน้าทีมพัฒนา ได้เลือกใช้คาร์บอนไฟเบอร์ ที่มีน้ำหนักเบาและผลิตโดยเครื่องพิมพ์สามมิติ บางชิ้นส่วนตัดโดยเครื่องกลึง CNC (Computer Numerical Control)
การควบคุมการเคลื่อนไหวของ Wheelchair Exoskeleton แบ่งออกเป็น 2 ส่วน ส่วนแรก คือ ล้อ ซึ่งได้กลุ่มนิสิตมาช่วยเขียนโปรแกรมล้อหน้าให้สามารถวิ่งตรงและเลี้ยวโค้งได้ ส่วนที่สองเป็นมอเตอร์ควบคุมข้อต่อสะโพกกับหัวเข่า เพื่อผสมผสานรถเข็นและ Exoskeleton เข้าด้วยกัน เมื่อใช้งาน ขาช่วงล่างสามารถเปลี่ยนโหมดการใช้งานได้ระหว่างนั่งและเดิน โดยใช้มอเตอร์ช่วยในการเคลื่อนไหวของข้อต่อสะโพกและหัวเข่า ส่วนข้อต่อข้อเท้าเป็นข้อต่ออิสระ ไม่มีการขับเคลื่อน ล้อซ้ายและขวาสามารถเก็บเข้าไปในส่วนขาส่วนล่าง เพื่อเปลี่ยนเป็นท่าเดินหรือข้ามสิ่งกีดขวางได้
advertisement
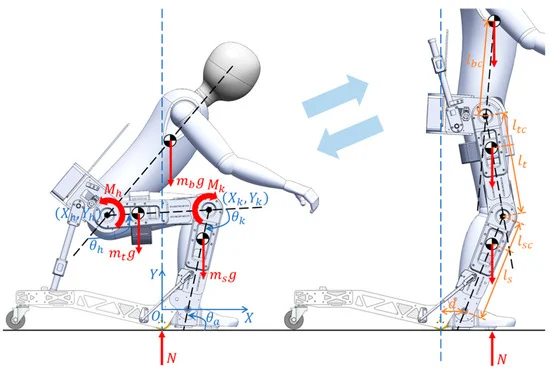
องค์ความรู้ที่ใช้พัฒนาหุ่นยนต์ Wheelchair Exoskeleton จากจุฬาฯ การออกแบบหุ่นยนต์ได้ใช้หลักการที่เรียกว่า Kinematics Compatibility หรือความเข้ากันได้เชิงจลศาสตร์ ในการออกแบบหุ่นสวมใส่บนร่างกาย เนื่องจากกระดูกมนุษย์เป็นกระดูกถ้วยกับกระดูกก้อนที่มาต่อแบบเลื่อนหมุนกัน แต่กลไกมอเตอร์นั้นหมุนรอบแกนหมุนแกนเดียว เมื่อเอามอเตอร์มาติด จะไม่สอดคล้องกับสรีระคนโดยตรง
รศ.ดร.รณพีร์ จึงออกแบบข้อต่อหัวเข่าให้เป็น Linkage หรือแบบเชื่อมโยง เพื่อให้เส้นทางการเคลื่อนที่ของจุดศูนย์กลางการหมุน สามารถเลียนแบบกระดูกจริง ส่วนข้อต่อที่มีการงอขามากจะใช้ข้อต่อแบบ Four-bar Linkage เพื่อให้จุดหมุนเปลี่ยนไปตามข้อต่อได้ สวมแล้วไม่ยืดหรือไม่หด ไม่ระคายผิวหนัง ทุกครั้งที่เหวี่ยงขาจริง Exoskeleton ก็ต้องเหวี่ยงไปด้วย เวลางอหัวเข่า หัวเข่าของหุ่นยนต์ก็ต้องงอไปพร้อมกัน โดยอาศัยองค์ความรู้ด้าน Biomechanic หรือชีวกลศาสตร์ ซึ่งสามารถคำนวณแรงบิดที่เกิดขึ้นจากรอบข้อเท้า หัวเข่า และสะโพกได้ เพื่อนำข้อมูลไปสร้างหุ่นยนต์ที่เหมาะสมกับสรีระของมนุษย์
advertisement

เป้าหมายและอนาคตของหุ่นยนต์ Wheelchair Exoskeleton จากจุฬาฯ
ปัจจุบัน Wheelchair Exoskeleton ยังคงเป็นเพียงตัวต้นแบบเพื่อพิสูจน์ความเป็นไปได้ทางทฤษฎี (Proof of Concept) เท่านั้น โดยแนวคิดดังกล่าวมาจากการเห็นปัญหาว่า วีลแชร์ปกติเคลื่อนที่ได้ตามทางปกติ แต่ขึ้นรถเมล์ไม่ได้ ขึ้นลงบันไดไม่ได้ ทีมพัฒนาจึงเชื่อว่าถ้าวีลแชร์สามารถพับขึ้นมาแล้วช่วยให้ผู้นั่ง ลุกขึ้นมาเดินได้ ก็จะสามารถทำให้ผู้ที่มีปัญหาทางการเคลื่อนไหวเดินได้สะดวกมากยิ่งขึ้น

นอกจากนี้ การพัฒนาหุ่นยนต์ภายใต้ห้องปฏิบัติการหุ่นยนต์ ยังเป็น Alternative Solution ของการศึกษา เพื่อสร้างสภาพแวดล้อมการพัฒนาที่มีเครื่องมือให้นิสิตได้ประกอบหุ่นยนต์ในเวลาว่างจากการเรียน นำเสนอแนวคิดที่อยากทำในที่ประชุม แล้วค่อยทดลองทำ ก่อนที่จะนำนวัตกรรมไปทดสอบกับผู้ใช้งานจริงต่อไป พร้อมเคลมว่าเป็นหุ่นยนต์ Wheelchair Exoskeleton ตัวแรกของโลกที่สร้างโดยฝีมือคนไทย
advertisement

หุ่นยนต์ Wheelchair Exoskeleton ได้รับการสนับสนุนทุนวิจัยจากสำนักการวิจัยแห่งชาติในปี พ.ศ. 2564 – 2565 และได้ผ่านเข้ารอบสุดท้ายในโครงการรางวัลนักเทคโนโลยีรุ่นใหม่ ประจำปี 2024 จัดโดยมูลนิธิส่งเสริมวิทยาศาสตร์และเทคโนโลยีในพระบรมราชูปถัมภ์อีกด้วย

–

โดยทีมพัฒนาอยู่ระหว่างพัฒนาหุ่นยนต์ Wheelchair Exoskeleton ต้นแบบตัวที่สอง โดยแก้ไขเรื่องการนั่ง การลุกให้มั่นคงและเดินได้สะดวกกว่าเดิม และกำลังอยู่ระหว่างการยื่นขอจดทรัพย์สินทางปัญญา พร้อมเตรียมประสานผู้เชี่ยวชาญด้านสถาปัตยกรรมศาสตร์มาช่วยออกแบบหุ่นยนต์ และผู้เชี่ยวชาญจากสหเวชศาสตร์เพื่อช่วยทดสอบการใช้งานจริงกับผู้ป่วยและผู้สูงอายุต่อไป
เรียบเรียงโดย : thaihitz.com ขอขอบคุณข้อมูลจาก chula.ac.th
advertisement